Production-focused world model — Waymo
Waymo · 2024 – present · Senior SWE
Current focus: expanding a production-focused world model to represent high-dimensional outputs while keeping inference costs down.
World models & simulation @ Waymo · NeurIPS 2024 first-author · ex-Google Brain
Currently building a production-focused world model at Waymo, expanding it to represent high-dimensional outputs while keeping inference costs down. Previously model lead on DermAssist at Google Health. First-author at NeurIPS 2024.

Experience
Sep 2022 – present
Senior Software Engineer
Now: Production-focused world model
Expanding the world model to represent high-dimensional outputs while keeping inference costs down.
Prev: ML for Road Understanding
Improved the perception model's ability to understand the semantics of construction zones.
Prev: ML for Behavior Prediction
Predicted the actions of cars, cyclists, and pedestrians so the car could safely share the road.
Feb 2017 – Sep 2022
Senior Software Engineer
DermAssist · Google Health Dermatology
Model lead. Identified the most promising research and shepherded it into the commercial product.
Medical labeling infrastructure · Google Health
Applied-ML collaborations across Google
Earlier
Jan – Dec 2016
Undergraduate Research Assistant
May – Aug 2016
Software Engineering Intern
Aug – Dec 2015
Digital Media Intern
May – Aug 2015
Software Engineering Intern
2012 – 2015
Digital Projects Lead → Senior Staff → Reporter
Education
2021 – 2024
M.S. Computer Science
Part-time, 4.0 GPA. AI/ML track. Independent project in model-based RL became a NeurIPS 2024 first-author paper.
Independent Project
project ↻CS399
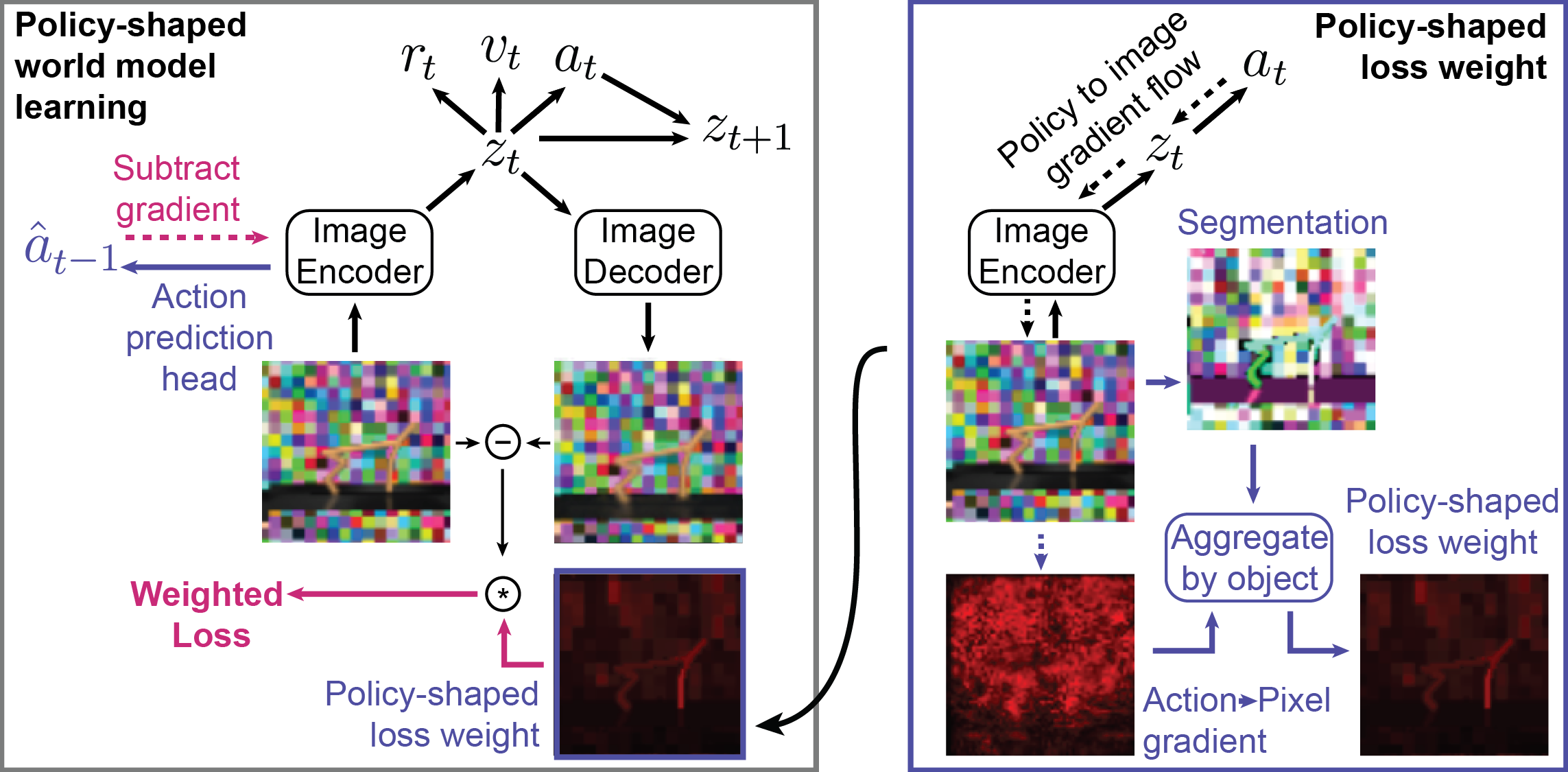
Model-based RL research that became "Policy-Shaped Prediction" — NeurIPS 2024 first-author paper.
Deep Multi-Task and Meta Learning
project ↻Trustworthy Machine Learning
project ↻CS329T
Black-box attack on text-summarization models that succeeds with less data than prior methods.
Natural Language Processing with Deep Learning
project ↻Artificial Intelligence: Principles and Techniques
project ↻CS221
Assigning left/right bias labels to news articles using NLP and explainability techniques.
Decision Making Under Uncertainty
project ↻Principles of Robot Autonomy I
project ↻AA274A
Robot that simultaneously localized + mapped its environment and the objects in it, then executed a retrieval mission.
Principles of Robot Autonomy II
Interactive and Embodied Learning
Advanced Topics in Networking
2012 – 2016
B.S. Computer Science
3.87 GPA. Transferred from Journalism junior year. Phi Beta Kappa, Temple Scholar, Liberal Arts Honors, Unrestricted Endowed Presidential Scholarship.
Selected work
Waymo · 2024 – present · Senior SWE
Current focus: expanding a production-focused world model to represent high-dimensional outputs while keeping inference costs down.
NeurIPS 2024 · 2024 · First author
Reconstruction-based world models (DreamerV3, DreamerPro) waste capacity modeling pixel detail that's irrelevant to the task. We use a pretrained segmentation model, a task-aware reconstruction loss, and adversarial learning to focus the world model on what matters for control — recovering performance under intricate, predictable, but useless distractors.
Google Health · 2019 – 2022 · Model lead · Frontend TL
Consumer dermatology tool — computer vision to suggest possible matches for skin, hair, and nail conditions. CE-Mark approved, demoed at Google I/O.
As model lead I trained the majority of the production classification ensemble, designed the differential-diagnosis metric, and led the ensemble distillation that shrank the model's footprint.
As frontend TL I shipped the on-device TensorFlow.js image-quality checks. I also built the continual-update pipeline and the Post-Market Monitoring system that tracks live model performance in the wild.
2021 · Monocular depth · VR
Monocular depth prediction trained on drone footage, then re-projected into a 3D point cloud you could walk through in VR. The fun part: depth-from-motion gives you most of the signal without needing stereo rigs or LiDAR.
2020 · OCR · Transformers
An OCR + Transformer baseline for extracting text from Reddit posts that get shared around as screenshots, plus the dataset I built and trained it on.
2019 · YOLO · Pi · OpenCV
YOLO-based pursuit robot, originally designed to chase a cat. Reprogrammed mid-demo to chase water bottles for safety reasons.
Hardware
details ↻Hardware
2019 · Particle filter · Lane detection
Autonomous RC car for DIY Robocar races. Iterated through two approaches — a simulator-trained particle filter, then a perspective-transform + hue-based lane detector.
Approach 1 — particle filter
details ↻Approach 1 — particle filter
Built a track simulator and trained particle-filter localization with online path planning against it. Worked well in sim; transferred poorly to the physical track.
Approach 2 — lane detection
details ↻Approach 2 — lane detection
Simpler and more robust: perspective transform from the onboard camera, hue-based segmentation of the painted lane lines, and a steering controller driven by the detected lane geometry.
Photography
Ground covered
And Miles to go before I sleep… My logged workouts and bay swims so far only cover a small part of the city. I can't wait to fill in more!
Contact
Working on something at the intersection of ML, simulation, or robotics? Happy to talk.